A few more thoughts on why Hollmann's criteria is not rational and a proposal for a more rational criteria. Hollman's proposed criteria of decent rate for calculating landing is :

How did he arrive at this ? Well, he used the fixed wing formula in FAR 23 by replacing wing loading with disc loading. FAR 23 however says that if the formula results in a sink rate less that 7 fps then it should be ignored and 7fps must be used as the minimum. Disc loading of gyros are very low and so if you use the above formula you will always get sink rates below 7fps. Because of this Hollmann proposes ignoring the minimum (7 fps) criteria in FAR 23.
There are two issues with this. First, ignoring the minimum seems arbitrary with no analytical justification.
Second, and more fundamentally it is based on fixed wing thinking. To understand this you have to look at the factor :

How was this arrived at? In a fixed wing the minimum decent rate is proportional to the square root of the span loading. If we assume the aspect ratio of wings are relatively constant across wing loadings (wings are geometrically similar), then the decent rate is proportional to the fourth root of the wing loading.
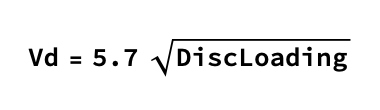
Does this apply to rotary craft ? Not really. In gyros the decent rate is proportional to the
square root of DiscLoading and not fourth root as in fixed wings ( and Hollmann's criteria). For example, vertical decent rate is roughly equal to

and minimum decent rate in a glide is around

This is why any criteria for decent rates in gyros for calculating landing loads should be based on the square root of disc loading and not the fourth root of disc loading like Hollmann suggested. Going with the fourth root is fixed wing thinking.
So what could a potential criteria look like ? I would go with something like

The drop height (in feet) for this criteria would be

This will result in very similar drop heights to Section T for heavily loaded gyros but give lower heights for lightly loaded gyros to take advantage of the lower sink rates.
Finally, the exact constant chosen in the formula can be different ( based on field experience and judgement) but it makes sense to base it on the square root of disc loading and not fourth root.


") .
.